
I’ve been making some progress with building my Codebuggy (Robot chassis for a codebug).
I’ve stripped a USB powerbank out of it’s shell and hot-glued it onto the chassis. I rotated the circuit board so that the USB socket was facing upward and I’ve covered it in hot-glue to make it safe for (and from) little fingers.

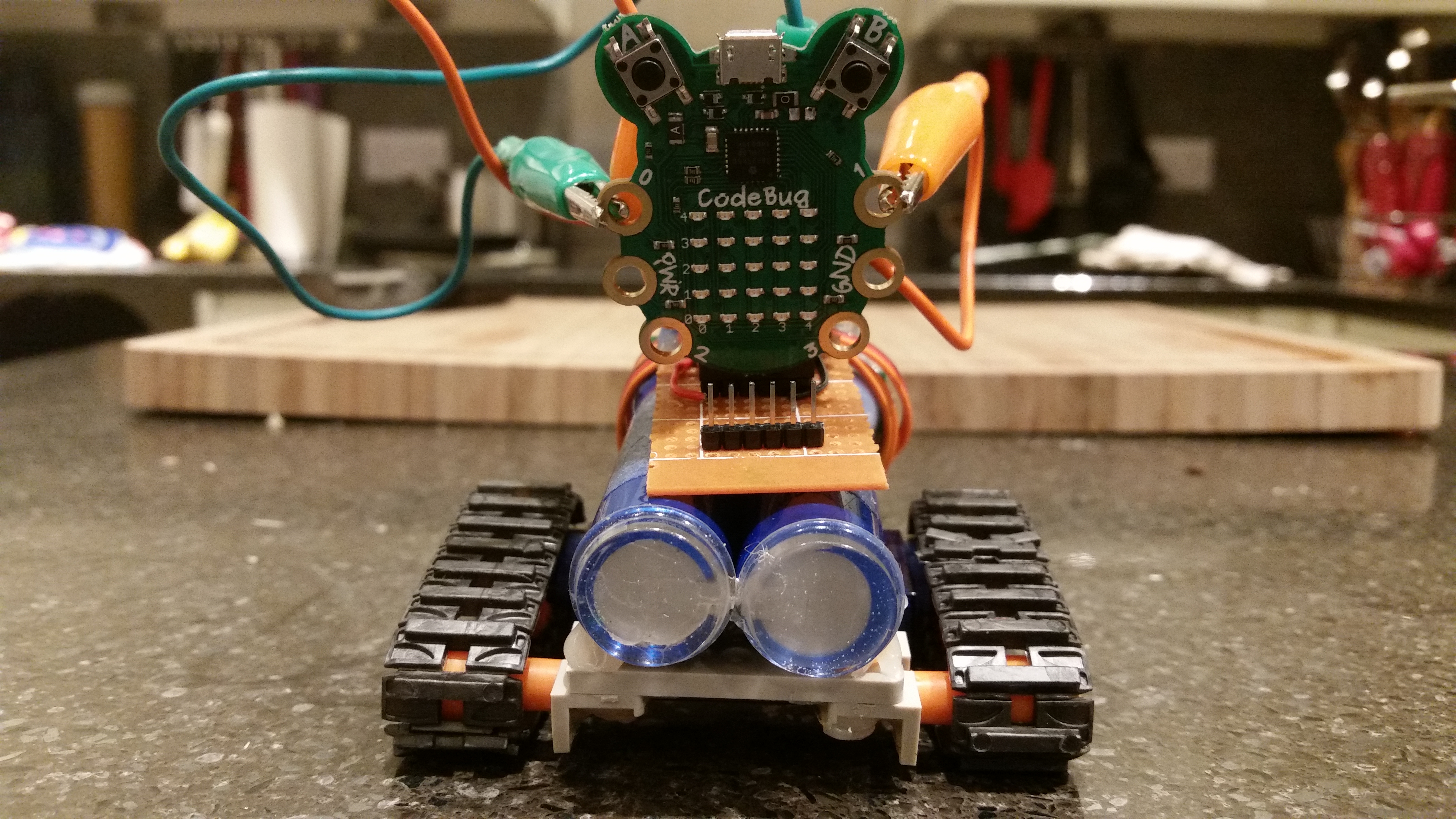
I made up an interface board to connect the servos and the codebug to the USB powerbank.
After a few hours I added a powerswitch to my interface board, making it easier to turn off the CodeBuggy (it runs off fairly quickly).
I’m having a problem adjusting the speed of the servos, they don’t respond correctly to changes in the program.
Still to do:
Replace experimenters kit croc clip leads with short connectors to codebug legs;
Improve control program.


